index_new5.html
../../../zaker_core/zaker_tpl_static/wap/tpl_guoji1.html
![]()
近期,懂车帝发布的“消失的前车”测试视频引发了广泛关注和讨论。本文作者在完整观看视频后,结合自身对实验设计的理解,探讨了测试的核心问题——不同品牌辅助驾驶系统在极端场景下的应对能力。作者进一步提出了更科学的实验设计建议,包括路况、前车速度、变道点、邻近车道交通状况及测试车状态的一致性,并着重讨论了车机参数设置的合理性。文章指出,当前智能驾驶技术远未成熟,用户仍需时刻保持警惕,并批评了部分车企夸大宣传、规避责任的现象,强调智能驾驶系统仅为辅助,不具备人类的防御性驾驶能力。
🚗 **实验设计优化建议**:为更科学地评估辅助驾驶系统在“前车突然变道并露出故障车”这一极端场景下的表现,作者提出应确保路况、前车速度(如132 km/h)、变道点与故障车的距离、邻近车道交通状况(如其他车辆保持132 km/h并与前车保持约30米间距)以及测试车跟车状态的一致性。这些细节对于获得可靠的横向对比至关重要。
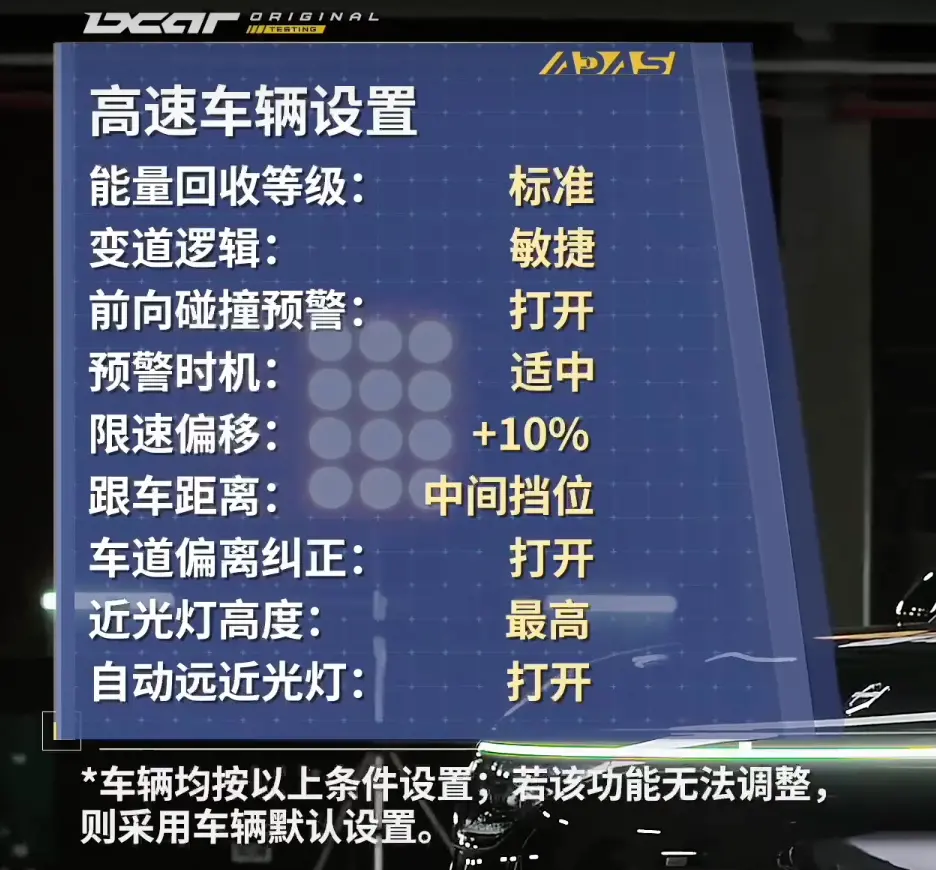
⚙️ **车机参数设置的争议与选择**:关于是统一实际跟车距离与时速,还是保持辅助驾驶参数设置一致,作者认为后者更为合理。因为实验核心在于检验不同系统在统一设定下的自主决策能力,参数设置应为控制变量,而系统自主选择的车速和车距则是因变量。同时,作者指出,统一设置“跟车距离等级”(如“最远”档位)比试图强制统一物理距离更为可行。
⚠️ **智能驾驶技术的成熟度与用户责任**:文章的核心观点是,当前“智能驾驶”技术远未成熟,用户绝不能完全依赖。即便启用辅助驾驶,驾驶员也需时刻保持专注,双手握紧方向盘,脚靠近刹车,随时准备应对突发情况。作者批评了部分车企夸大宣传、事故发生后推卸责任的现象,强调智能驾驶系统仍处于“幼儿园阶段”,不具备人类的防御性驾驶能力。
🤔 **关注自身安全而非品牌排名**:作者认为,网友将焦点集中在品牌排名上,为支持的车企辩护,这是本末倒置。即使测试条件不完全一致,只要某一品牌在特定条件下显示出潜在风险,就应引起车主自身的警惕。关注自身安全才是最重要的,而非陷入品牌间的争议。
这几日,懂车帝发布的视频引发了广泛热议,尤其是其中关于“消失的前车”的部分,吸引了大量关注与质疑。我完整观看懂车帝的视频,也一些想法想与大家分享。
实验设计
“消失的前车”这一测试环节备受争议,主要集中在测试车与前车之间的车距差异,以及测试车当时车速的不同,很多人因此质疑该实验设计不合理。
我也思考了一下,如果由我来设计这个测试,应该如何更科学地实施?
探究问题
本次测试的核心问题是:不同品牌的辅助驾驶系统在“前车突然变道并露出故障车”这一极端场景下的应对能力表现如何。换言之,主要测试当前智能驾驶系统面对突发状况的处理能力。
实验设计
具体的设计流程在此不再赘述,但以下几个细节我认为尤为关键:
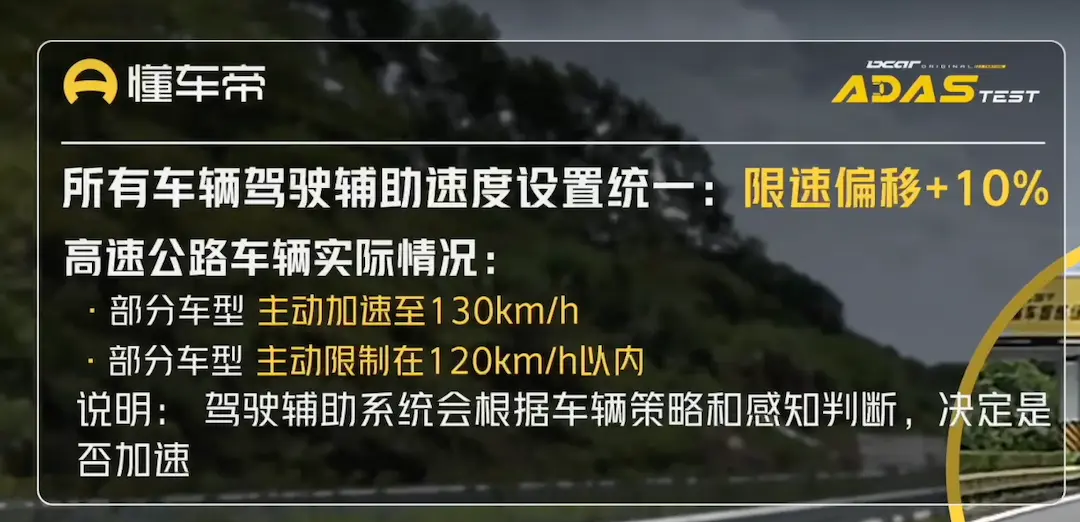
路况一致性:应尽可能确保各测试车辆面临完全一致的路况与情境,否则所得结果无法进行有效的横向对比。前车速度一致:测试中前车应保持相同速度,例如设定为132 km/h(即限速120km/h + 10%浮动)。前车变道点保持一致:前车变道时与故障车的距离应相同。为确保一致性,可在道路两侧设置参考标记,既方便司机操作,也可作为视频佐证。邻近车道交通状况保持一致。 快车道上的其他车辆,也应与前车保持相对固定的位置。例如,同样以132km/h的速度行驶,并与前车保持约30米的间距。这是因为,邻近车道的交通状况会直接影响辅助驾驶系统的环境感知,进而影响其决策。如果邻车距离较远,系统或许会误判变道为最优解(尽管我个人不认同此逻辑);反之,只有当邻车距离足够近时,系统才可能将紧急制动判定为最安全的选项。测试车状态一致:测试车应与前车保持稳定跟车状态并持续一段距离。一些车辆可能已经完成加速阶段,稳定在132 km/h;而另一些仍处于加速过程中,车速尚低(如120 km/h),这将显著影响测试结果的可比性。车机参数设置一致:这也是网上争议最大的一点:究竟是应该调整车辆,使所有车都达到相同的实际跟车距离和时速,还是应该保持辅助驾驶的参数设置一致?我认为,要达成此次的测试目的,后者才是更合理的设计。
首先,实验的核心是检验不同系统在统一设定下的自主决策能力。因此,参数设置本身是控制变量,而系统在此设定下自主选择的车速和车距,则是体现其能力的因变量。其次,试图让不同品牌的车辆保持绝对一致的物理车距,在现实中几乎是不可能的。以跟车距离为例,即便所有车辆都设有“1、2、3”档,A品牌的各档位可能对应10米、20米、30米,而B品牌则可能是15米、25米、35米,这种差异是普遍存在的。 鉴于上述原因,统一设置车机的“跟车距离等级”更为合理。视频中提到设置为“中档”,但在实际高速驾驶中,许多用户都会选择“最远”档位,因此是否将其统一设置为“最远”更为恰当,也值得商榷。(至少我是这么设置的🙈)
除了车机设置统一外,视频中似乎未对上述其他几个关键点作出明确说明。如有遗漏,欢迎补充。
其他想法
懂车帝视频最想传递的核心信息是:当下所谓的“智能驾驶”技术远未成熟到可以完全放心依赖的程度。即便启用辅助驾驶功能,驾驶员仍需时刻专注前方路况,双手握紧方向盘。
相比那些具体测试数据与排名,这段19分钟的视频更有意义。「“直到碰撞前最后一秒,我都是相信它的”,“智驾”事故的背后,有问题吗?」
然而,网友们的关注点似乎集中在各品牌的排名上,不断试图为自己支持的车企辩护。退一步讲,即使测试条件未完全一致,比如A品牌车距50米、车速130,B品牌车距100米、车速120,这至少说明A车在该条件下存在潜在风险。其他品牌如何,不重要,关注自身安全才最关键。
如今,越来越多车企将“智驾”作为宣传重点,宣传时夸大其词,一旦发生事故则推责于用户。而一些不明真相的小白用户,往往会轻信宣传,毫无保留地将自身与家人的生命安全交给尚处于“幼儿园阶段”的智能驾驶系统。
近年来,车企们纷纷将智能驾驶吹嘘得天花乱坠,并将其作为核心卖点。结果往往是:没出事时,大肆宣传智驾的强大;一旦出事,责任便推给了用户。许多不明就里的消费者,很容易盲目相信厂商的宣传,将自己与家人的生命安全,托付给一个仍处于“幼儿园阶段”的辅助系统。
我曾在《谁说电动车不能开长途?1700公里春运返程分享》一文中提过,在长途高速上,我也会使用辅助驾驶,甚至超过70%的路程会开启辅助驾驶。即便如此,我始终紧盯前方,双手握着方向盘,脚始终靠近刹车,随时准备应对突发情况。因为我深知,目前市面上所有的智驾系统,都不具备人类的“防御性驾驶”能力——它不懂得主动远离大货车,不会避免在两辆大车之间行驶,也不懂得在视野受限时主动减速。
它们只是程序,只是辅助系统,而不是具备人类经验与判断力的司机。
或许,只有当开启智能驾驶时方向盘被锁死、事故由厂商全责承担的那一天到来,我才会真正相信“全自动驾驶”已成现实。未来也许终会如此,但显然,那一天还没到来。
看了懂车帝的视频,我有一些想法最先出现在Jack's Space。

