
机器人打乒乓球,这(zhei)您受得了吗?
关键玩的还都是高难度:并步接球!

0.42秒极限反应回击扣球!
最高还能对拉106拍!
打不过,反正我是打不过。
这位乒乓球场上的机器人高手,出自清华姚班本科生苏智(师从吴翼教授)的最新论文——《HITTER: A HumanoId Table TEnnis Robot via Hierarchical Planning and Learning》。
在这篇论文中,研究者们提出了一套结合模型规划与强化学习的分层框架,实现了人形机器人在亚秒级(sub-second)反应下的稳定连续对打。
这是怎么做到的?
基于规划与控制的分层框架
总的来说,为了教机器人打乒乓球,研究团队提出了一个将高层规划与低层控制分开处理的框架。
其中,在高层规划中,基于模型的规划器(model-based planner)能够导航球的轨迹,并预测击球位置、速度和时机。
在低层框架中,基于强化学习(RL)的全身控制器,能够根据规划器的预测,生成协调的手臂和腿部动作来执行与人类相似的打击动作。
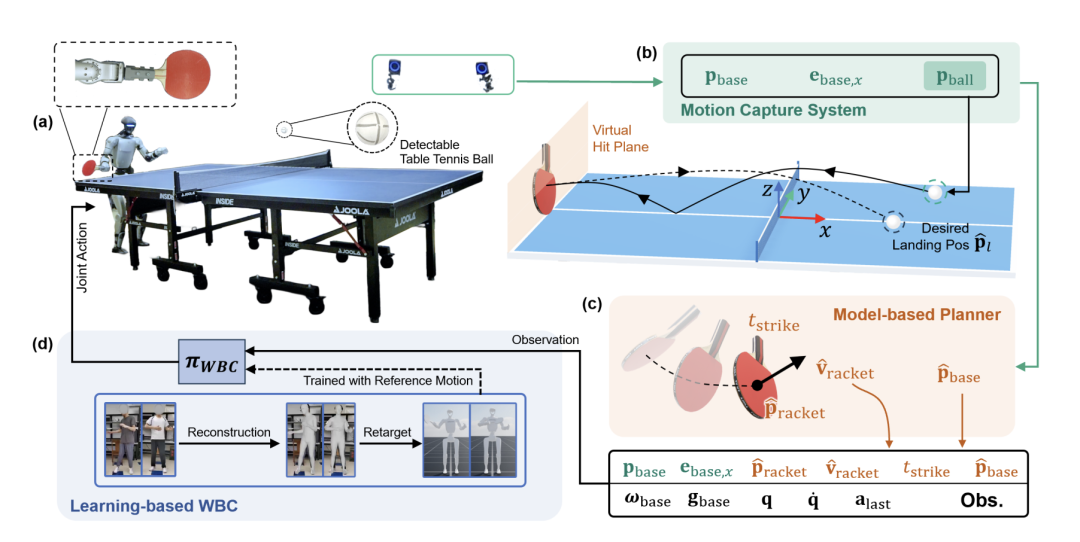
具体来说,研究团队直接将宇树G1的手掌变成了乒乓球拍,并让它站在一张标准尺寸的乒乓球台上进行训练。
在感知方面,研究采用了九个OptiTrack摄像头(运行频率为360 Hz)来追踪球的位置,这达到了毫米级的精度。
在规划方面,基于模型的规划器在每个时间步接收球的位置数据,并预测球拍的击球位置、速度和时机。
这些预测被交付给全身控制器,以生成宇树G1所需的击球时机和球拍速度。
之后,机器人根据强化学习不断调整击球策略,提高运动表现。
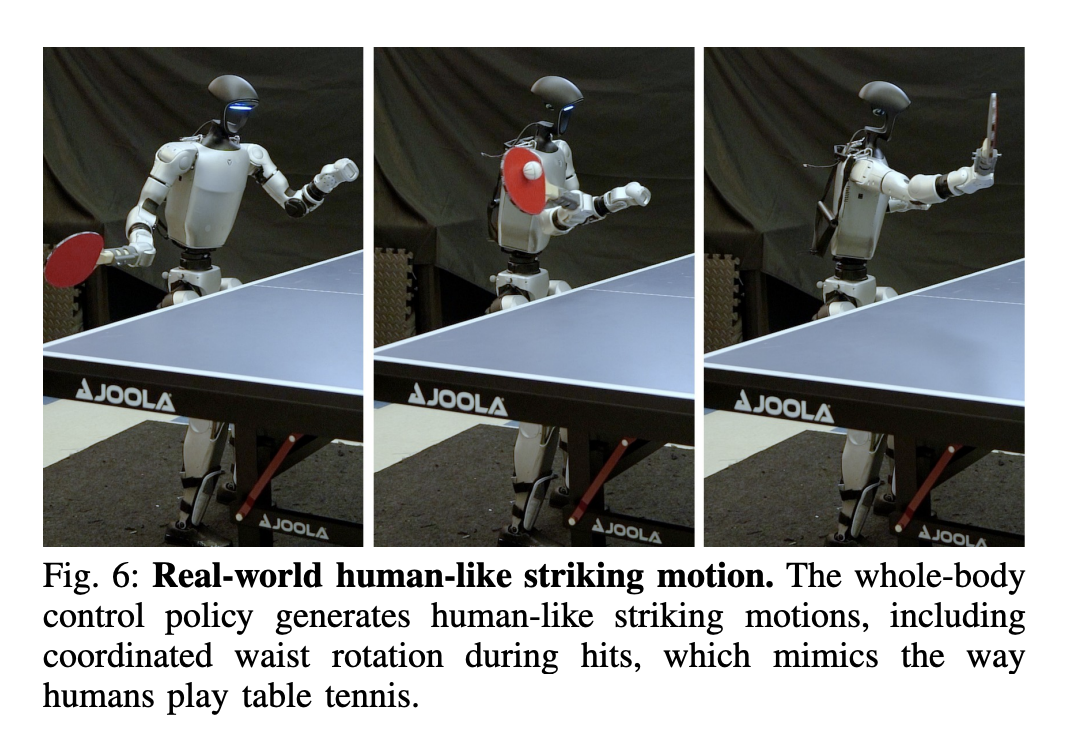
此外,为了鼓励机器人做出类似人类的挥拍动作,研究人员还在策略训练中加入了人类动作参考(正手和反手)。
通过人类动作参考进行训练,机器人产生了与人类动作非常相似的击球行为:例如下图中机器人击球时的腰部旋转。
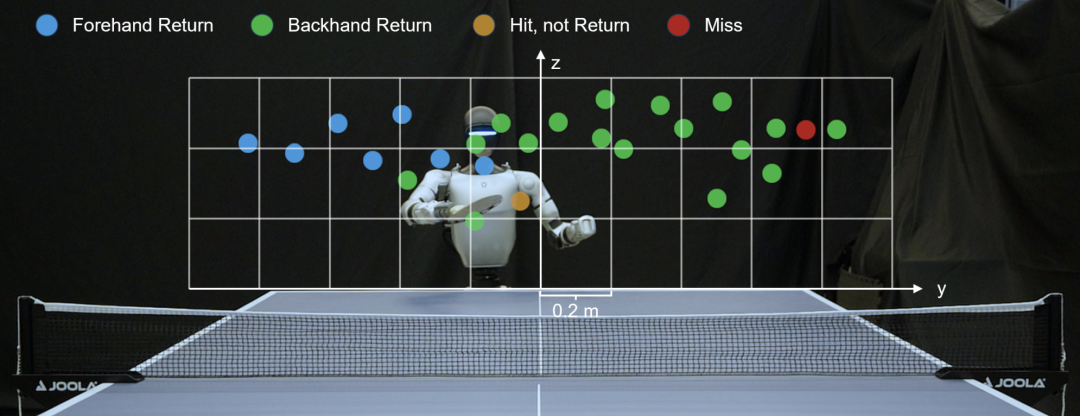
在真实世界的实验中,团队向机器人投掷了26个球,机器人成功回球24次,击中后未回球1次,完全失球1次,达到了96.2%的击球率和92.3%的回球率。
而且,就像我们开头提到的,G1在与人类对手对打时,实现了多达106次的连续击球,这一连拍远远超过了休闲人类玩家的水平。
此外,G1还表现出了回击扣球的能力。
最后,值得一提的是,除了与人类进行对战,机器人也可以在完全自主的匹配环境中持续进行对战。
为什么是乒乓球?
在前段时间的机器人运动会上,我们已经看到了不少机器人参与的运动项目(如跑步、拳击、足球等)。
不过,这些运动往往留给机器人较长的调整与反应时间。
而在现实生活中,机器人常常需要在动态环境下与快速移动的物体交互,这种交互从根本上讲更难:
因为它们不仅需要各个关节的协调控制,还需要在极限时间测量内运行的精密感知-行动闭环,而乒乓球正是此类交互的绝佳例子。
相对于网球或羽毛球等运动,乒乓球的距离更短、攻防转换更快、反应时间窗口更小(球速超过5米/秒)。
这就意味着机器人系统必须在瞬间内完成感知、预测、规划和击球以及与移动或静态的不同操作。
更难的是,成功的击球需要敏捷的全身运动,包括快速摆动手臂、转动腰部、快速垫步和恢复平衡,以确保准确击球并为下一次打做好准备。
所以,打乒乓球,对人形机器人来说,还真不是一件容易的事。
已经开始期待下一次的机器人运动会了!
参考链接:
[1]https://arxiv.org/pdf/2508.21043
[2]https://humanoid-table-tennis.github.io
一键三连「点赞」「转发」「小心心」
欢迎在评论区留下你的想法!
— 完 —
 扫码添加小助手,发送「姓名+公司+职位」申请入群~
扫码添加小助手,发送「姓名+公司+职位」申请入群~
🌟 点亮星标 🌟
内容中包含的图片若涉及版权问题,请及时与我们联系删除
