
The Challenge of Scaling 3D Environments in Embodied AI
Creating realistic and accurately scaled 3D environments is essential for training and evaluating embodied AI. However, current methods still rely on manually designed 3D graphics, which are costly and lack realism, thereby limiting scalability and generalization. Unlike internet-scale data used in models like GPT and CLIP, embodied AI data is expensive, context-specific, and difficult to reuse. Reaching general-purpose intelligence in physical settings requires realistic simulations, reinforcement learning, and diverse 3D assets. While recent diffusion models and 3D generation techniques show promise, many still lack key features such as physical accuracy, watertight geometry, and correct scale, making them inadequate for robotic training environments.
Limitations of Existing 3D Generation Techniques
3D object generation typically follows three main approaches: feedforward generation for fast results, optimization-based methods for high quality, and view reconstruction from multiple images. While recent techniques have improved realism by separating geometry and texture creation, many models still prioritize visual appearance over real-world physics. This makes them less suitable for simulations that require accurate scaling and watertight geometry. For 3D scenes, panoramic techniques have enabled full-view rendering, but they still lack interactivity. Although some tools attempt to enhance simulation environments with generated assets, the quality and diversity remain limited, falling short of complex embodied intelligence research needs.
Introducing EmbodiedGen: Open-Source, Modular, and Simulation-Ready
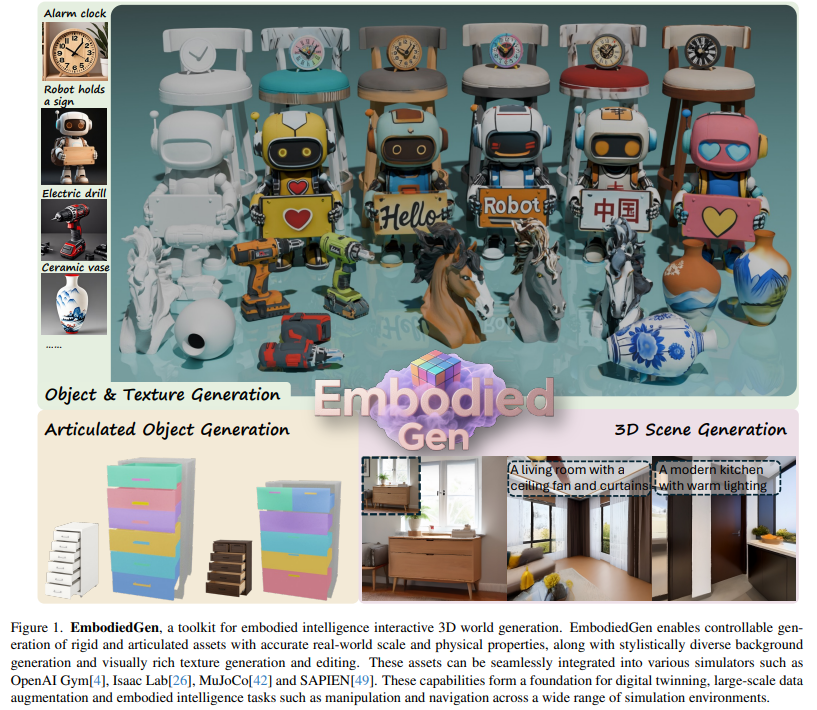
EmbodiedGen is an open-source framework developed collaboratively by researchers from Horizon Robotics, the Chinese University of Hong Kong, Shanghai Qi Zhi Institute, and Tsinghua University. It is designed to generate realistic, scalable 3D assets tailored for embodied AI tasks. The platform outputs physically accurate, watertight 3D objects in URDF format, complete with metadata for simulation compatibility. Featuring six modular components, including image-to-3D, text-to-3D, layout generation, and object rearrangement, it enables controllable and efficient scene creation. By bridging the gap between traditional 3D graphics and robotics-ready assets, EmbodiedGen facilitates the scalable and cost-effective development of interactive environments for embodied intelligence research.
Key Features: Multi-Modal Generation for Rich 3D Content
EmbodiedGen is a versatile toolkit designed to generate realistic and interactive 3D environments tailored for embodied AI tasks. It combines multiple generation modules: transforming images or text into detailed 3D objects, creating articulated items with movable parts, and generating diverse textures to improve visual quality. It also supports full scene construction by arranging these assets in a way that respects real-world physical properties and scale. The output is directly compatible with simulation platforms, making it easier and more affordable to build lifelike virtual worlds. This system helps researchers efficiently simulate real-world scenarios without relying on expensive manual modeling.
Simulation Integration and Real-World Physical Accuracy
EmbodiedGen is a powerful and accessible platform that enables the generation of diverse, high-quality 3D assets tailored for research in embodied intelligence. It features several key modules that allow users to create assets from images or text, generate articulated and textured objects, and construct realistic scenes. These assets are watertight, photorealistic, and physically accurate, making them ideal for simulation-based training and evaluation in robotics. The platform supports integration with popular simulation environments, including OpenAI Gym, MuJoCo, Isaac Lab, and SAPIEN, enabling researchers to efficiently simulate tasks such as navigation, object manipulation, and obstacle avoidance at a low cost.
RoboSplatter: High-Fidelity 3DGS Rendering for Simulation
A notable feature is RoboSplatter, which brings advanced 3D Gaussian Splatting (3DGS) rendering into physical simulations. Unlike traditional graphics pipelines, RoboSplatter enhances visual fidelity while reducing computational overhead. Through modules like Texture Generation and Real-to-Sim conversion, users can edit the appearance of 3D assets or recreate real-world scenes with high realism. Overall, EmbodiedGen simplifies the creation of scalable, interactive 3D worlds, bridging the gap between real-world robotics and digital simulation. It is openly available as a user-friendly toolkit to support broader adoption and continued innovation in embodied AI research.
Why This Research Matters?
This research addresses a core bottleneck in embodied AI: the lack of scalable, realistic, and physics-compatible 3D environments for training and evaluation. While internet-scale data has driven progress in vision and language models, embodied intelligence demands simulation-ready assets with accurate scale, geometry, and interactivity—qualities often missing in traditional 3D generation pipelines. EmbodiedGen fills this gap by offering an open-source, modular platform capable of producing high-quality, controllable 3D objects and scenes compatible with major robotics simulators. Its ability to convert text and images into physically plausible 3D environments at scale makes it a foundational tool for advancing embodied AI research, digital twins, and real-to-sim learning.
Check out the Paper and Project Page All credit for this research goes to the researchers of this project. Also, feel free to follow us on Twitter and don’t forget to join our 100k+ ML SubReddit and Subscribe to our Newsletter.
FREE REGISTRATION: miniCON AI Infrastructure 2025 (Aug 2, 2025) [Speakers: Jessica Liu, VP Product Management @ Cerebras, Andreas Schick, Director AI @ US FDA, Volkmar Uhlig, VP AI Infrastructure @ IBM, Daniele Stroppa, WW Sr. Partner Solutions Architect @ Amazon, Aditya Gautam, Machine Learning Lead @ Meta, Sercan Arik, Research Manager @ Google Cloud AI, Valentina Pedoia, Senior Director AI/ML @ the Altos Labs, Sandeep Kaipu, Software Engineering Manager @ Broadcom ]
The post EmbodiedGen: A Scalable 3D World Generator for Realistic Embodied AI Simulations appeared first on MarkTechPost.
